|
I am a PhD student at UC Berkeley advised by Prof. Masayoshi Tomizuka and Prof. Andrea Bajcsy at Carnegie Mellon University. My research lies in the intersection of robotics and AI with a focus on safe alignment between embodied agents and humans. I tackle the alignment and safety problems that emerge throughout the life-cycle of foundation models in robotics, ranging from: training (wherein we need to collect and quantify what kinds of embodied data will enable the desired robotics capabilities), to fine-tuning (wherein we must align these models with humans), to deployment (where these models must run in real-time, reliably detect out-of-distribution scenarios, and confidently hand over control to fallback-strategies). I ground my work through a variety of applications, from autonomous cars, to personalized robots, to generative AI and in experiments with real human participants. During my PhD study, I also spent a significant amount of time at Waymo, scaling my research outcomes in driving foundation models, including pre-training, post-training preference alignment, and distillation for onboard deployment. I am fortunate to have the opportunity to work at NVIDIA Research, focusing on vision-language-action models for autonomous driving. Previously, I was a research intern at WeRide, Honda Research Institute, and Qualcomm AI Research. |

|
|
|
|
|

|
For the most up-to-date list of publications, please see google scholar.
|
|
Ran Tian, Kratarth Goel International Conference on Learning Representations (ICLR), 2025, Spotlight paper paper website |
|
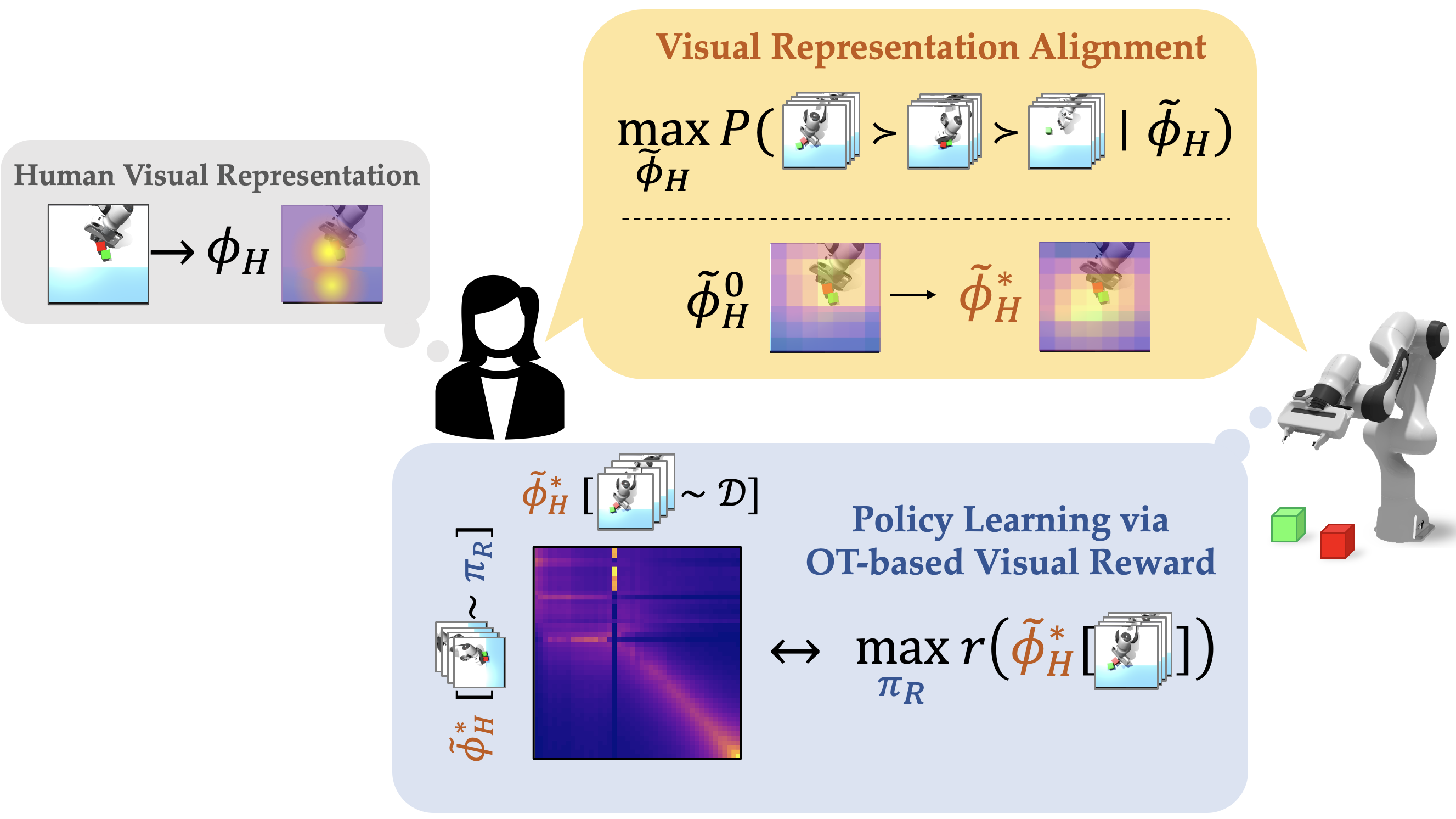
Ran Tian, Yilin Wu, Chenfeng Xu, Masayoshi Tomizuka, Jitendra Malik, Andrea Bajcsy arXiv, 2024 paper website |
|
Yilin Wu, Ran Tian, Gouku Swamy, Andrea Bajcsy Robotics: Science and Systems, 2025 & ICLR Workshop on World Models, 2025, Best paper award. paper website |
 |
Ran Tian, Chenfeng Xu, Masayoshi Tomizuka, Jitendra Malik, Andrea Bajcsy International Conference on Learning Representations (ICLR), 2024 paper |
 |
Google, Ran Tian, et al. International Conference on Robotics and Automation (ICRA), 2024, Best paper award paper website |
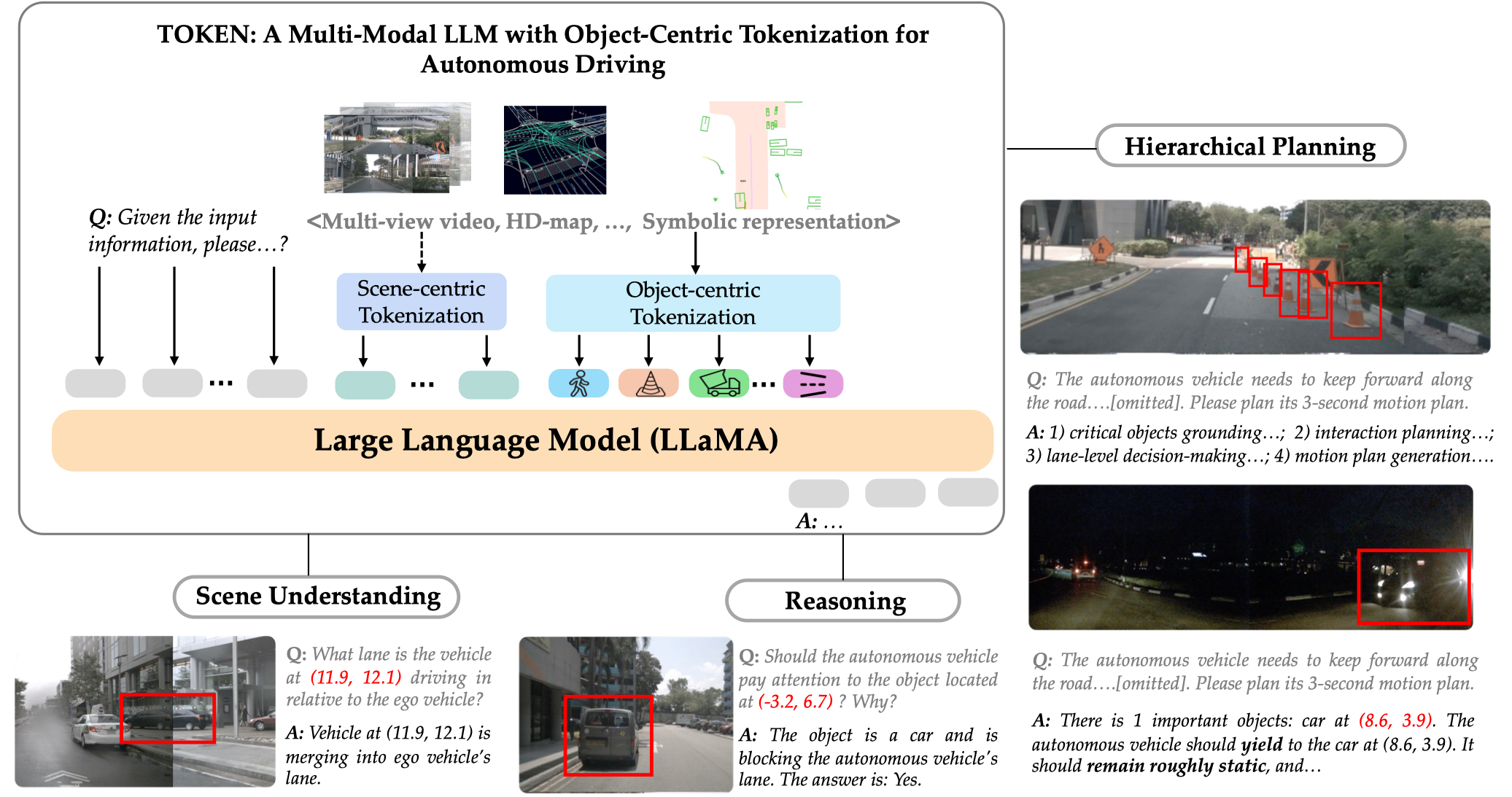 |
Ran Tian, Boyi Li, Xinshuo Weng, Yuxiao Chen, Edward Schmerling, Yue Wang, Boris Ivanovic, Marco Pavone Conference on Robot Learning (CoRL), 2024 paper website |
 |
Mingxiao Huo, Mingyu Ding, Chenfeng Xu, Ran Tian, Xinghao Zhu, Yao Mu Lingfeng Sun, Masayoshi Tomizuka, Wei Zhan Robotics: Science and Systems, 2024 paper website |
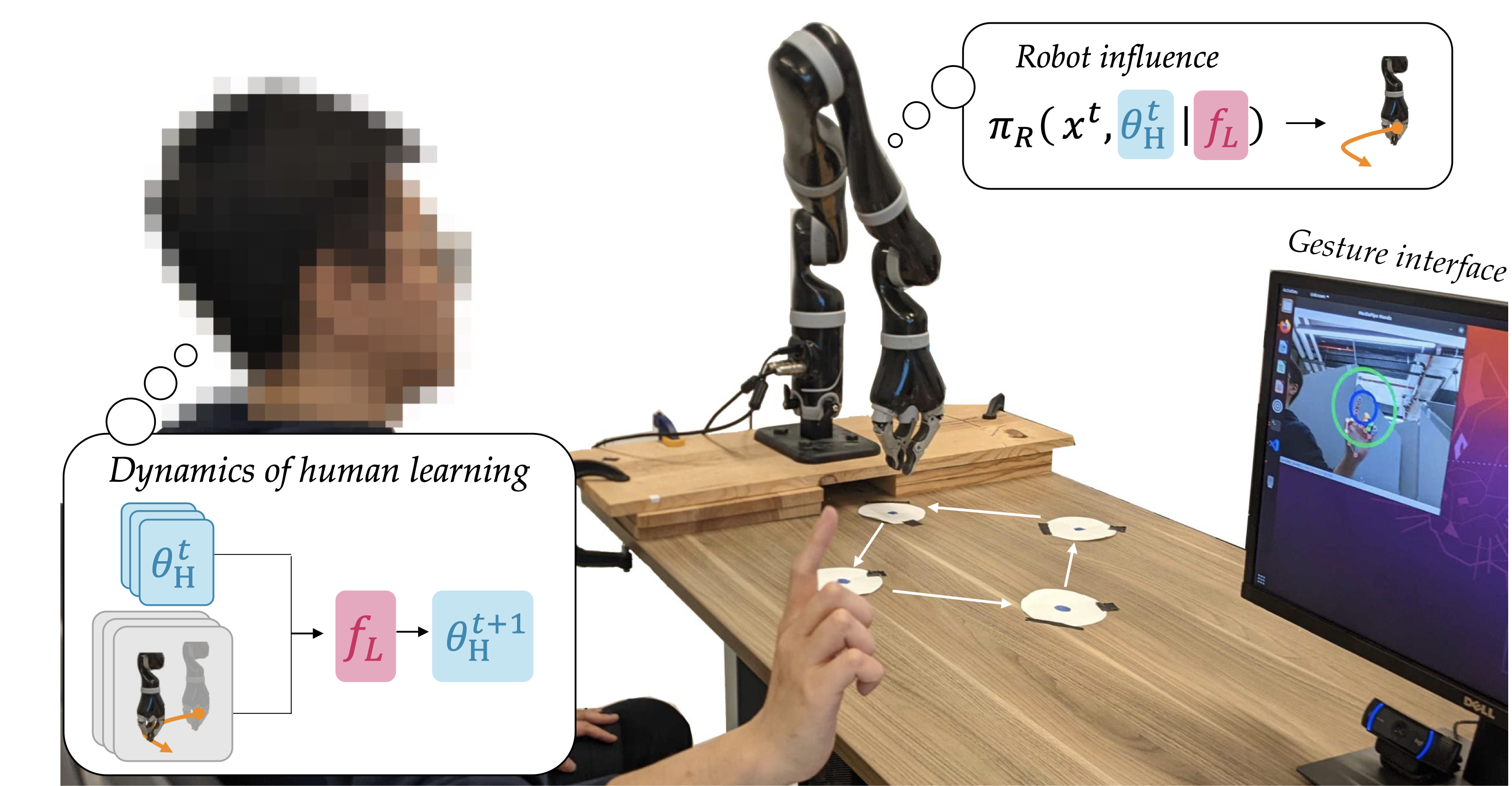 |
Ran Tian, Masayoshi Tomizuka, Anca Dragan, Andrea Bajcsy International Conference on Human-Robot Interaction (HRI), 2023 paper talk |
 |
Ran Tian, Liting Sun, Andrea Bajcsy, Masayoshi Tomizuka, Anca Dragan International Conference on Robotics and Automation (ICRA), 2022 paper talk |
|
website adapted from here |